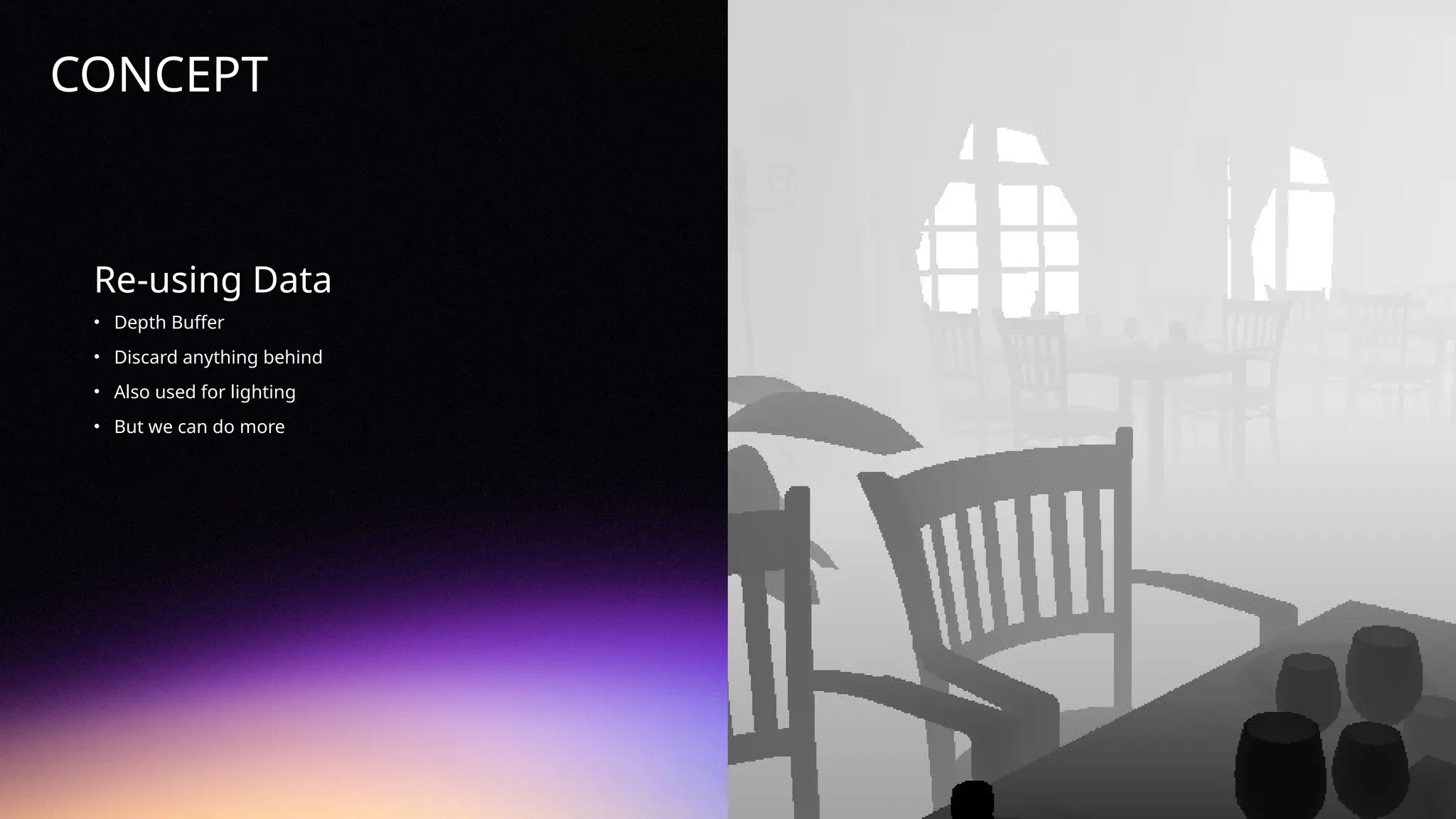
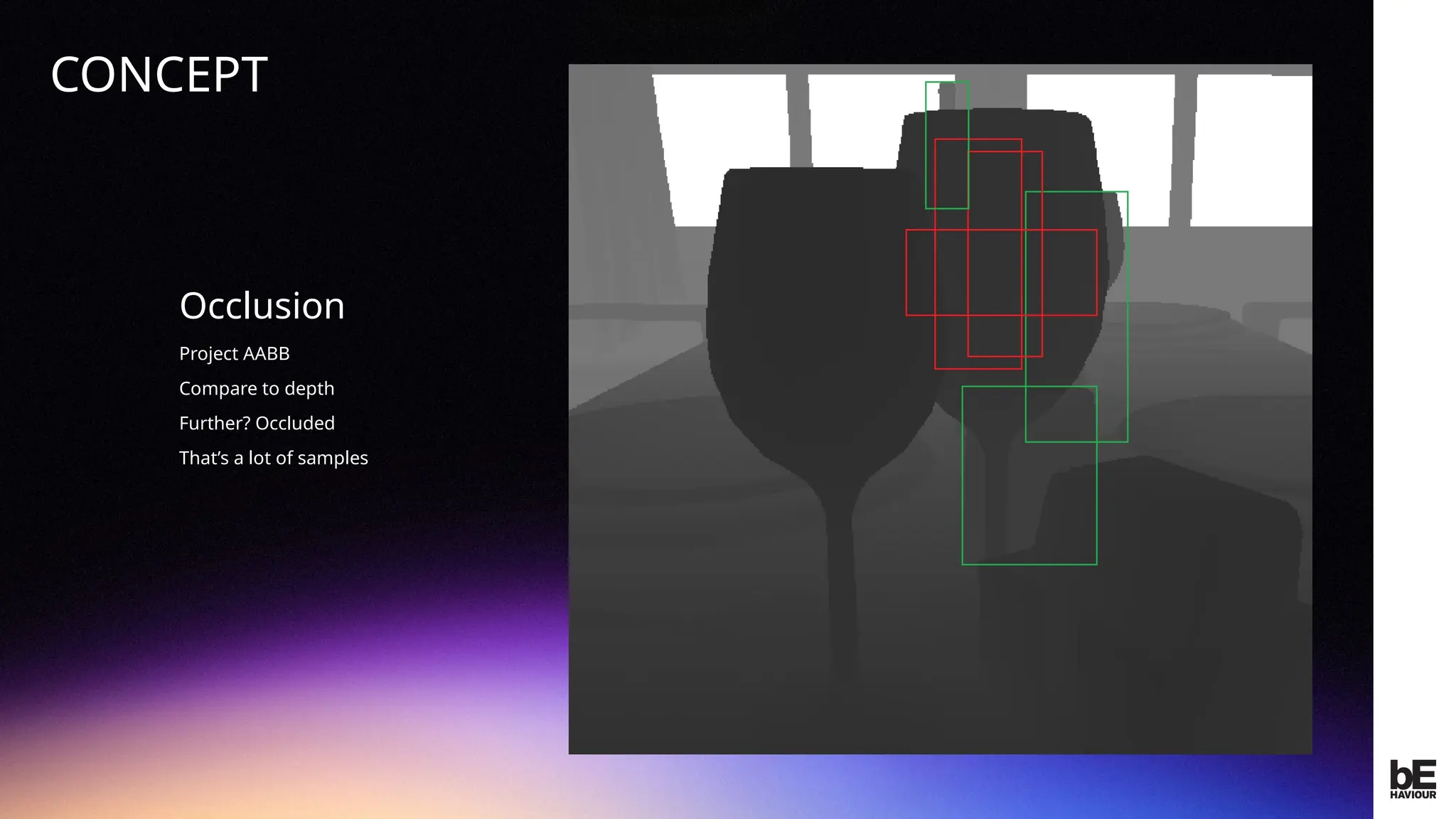
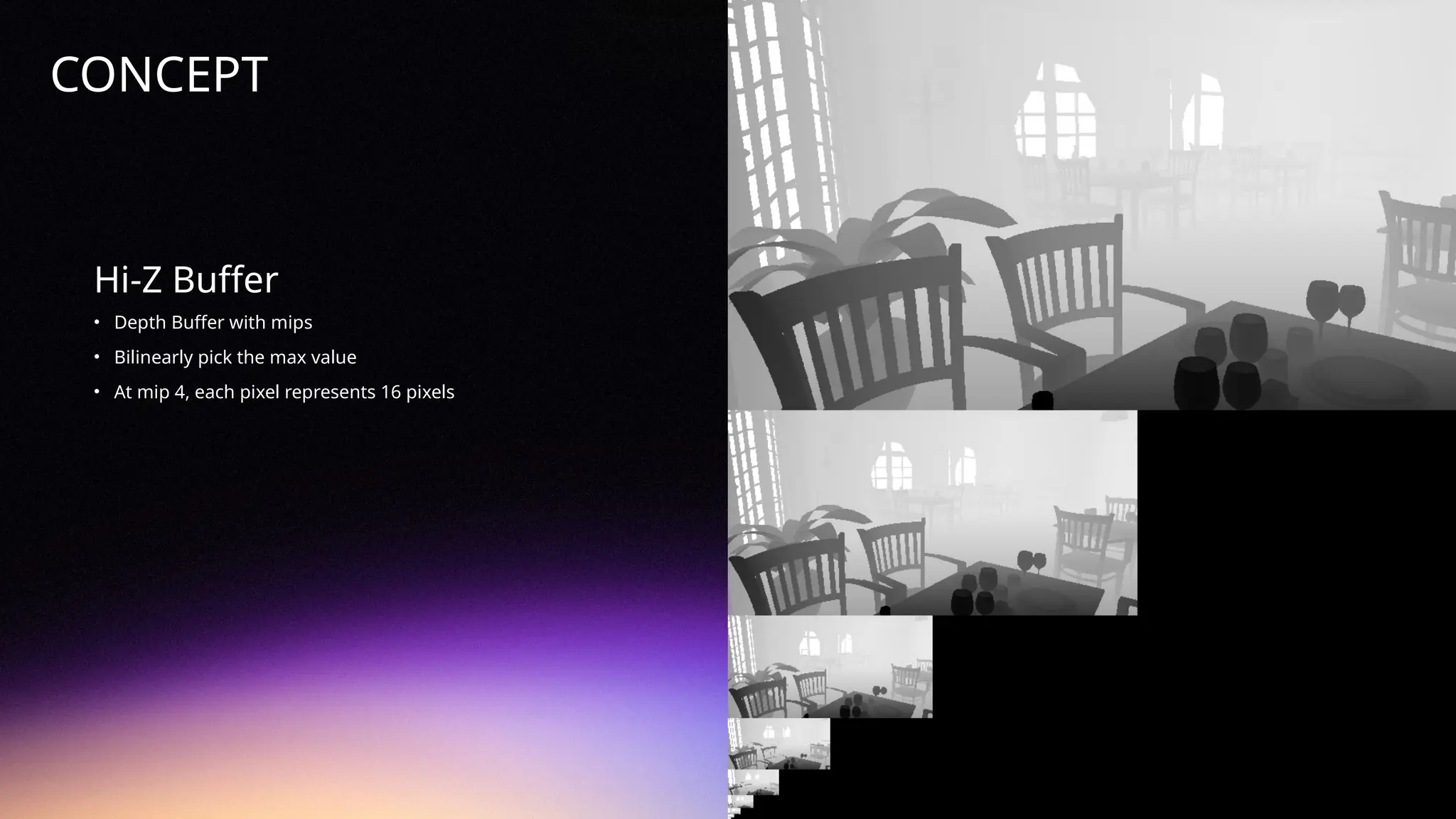
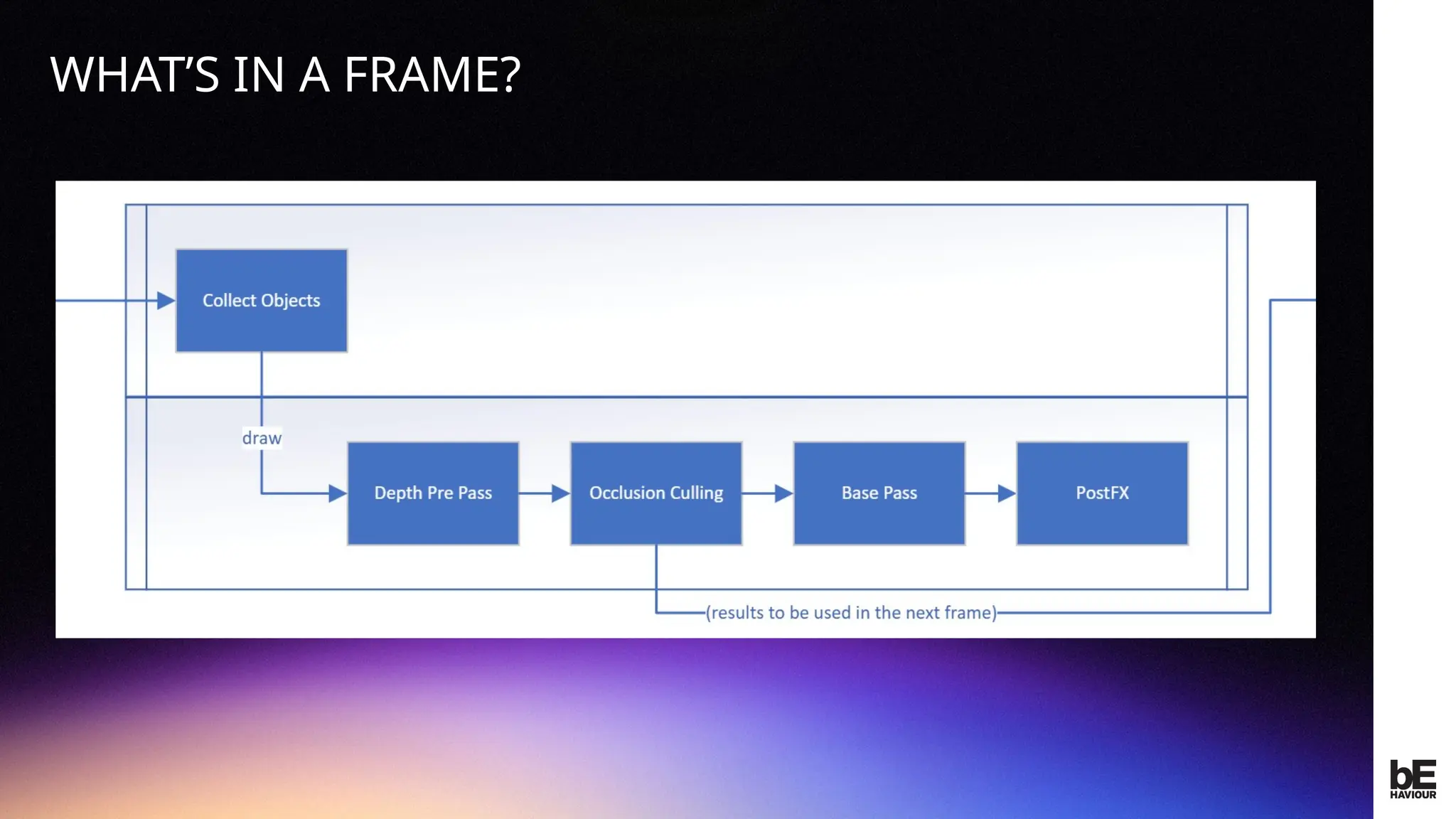
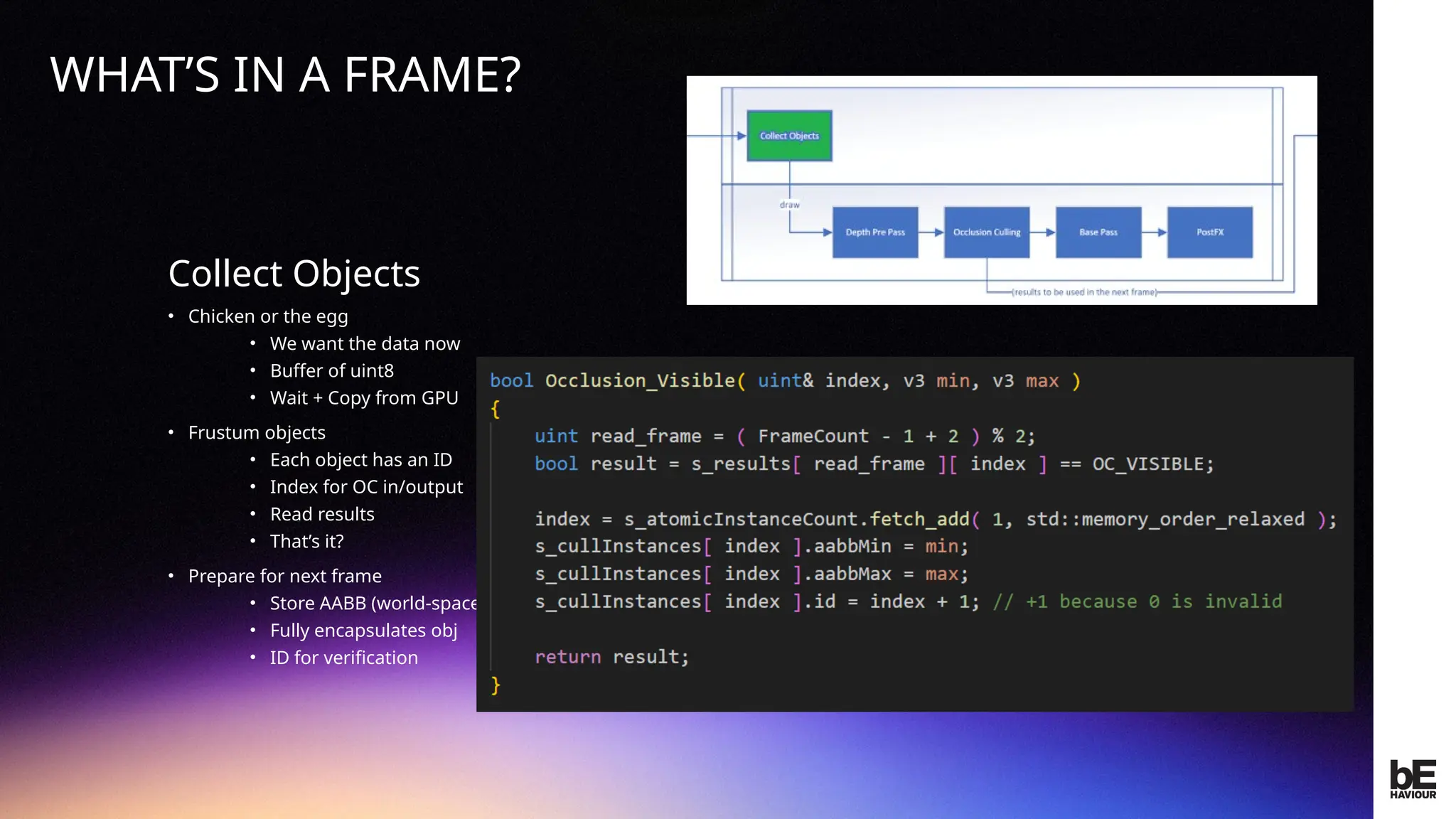
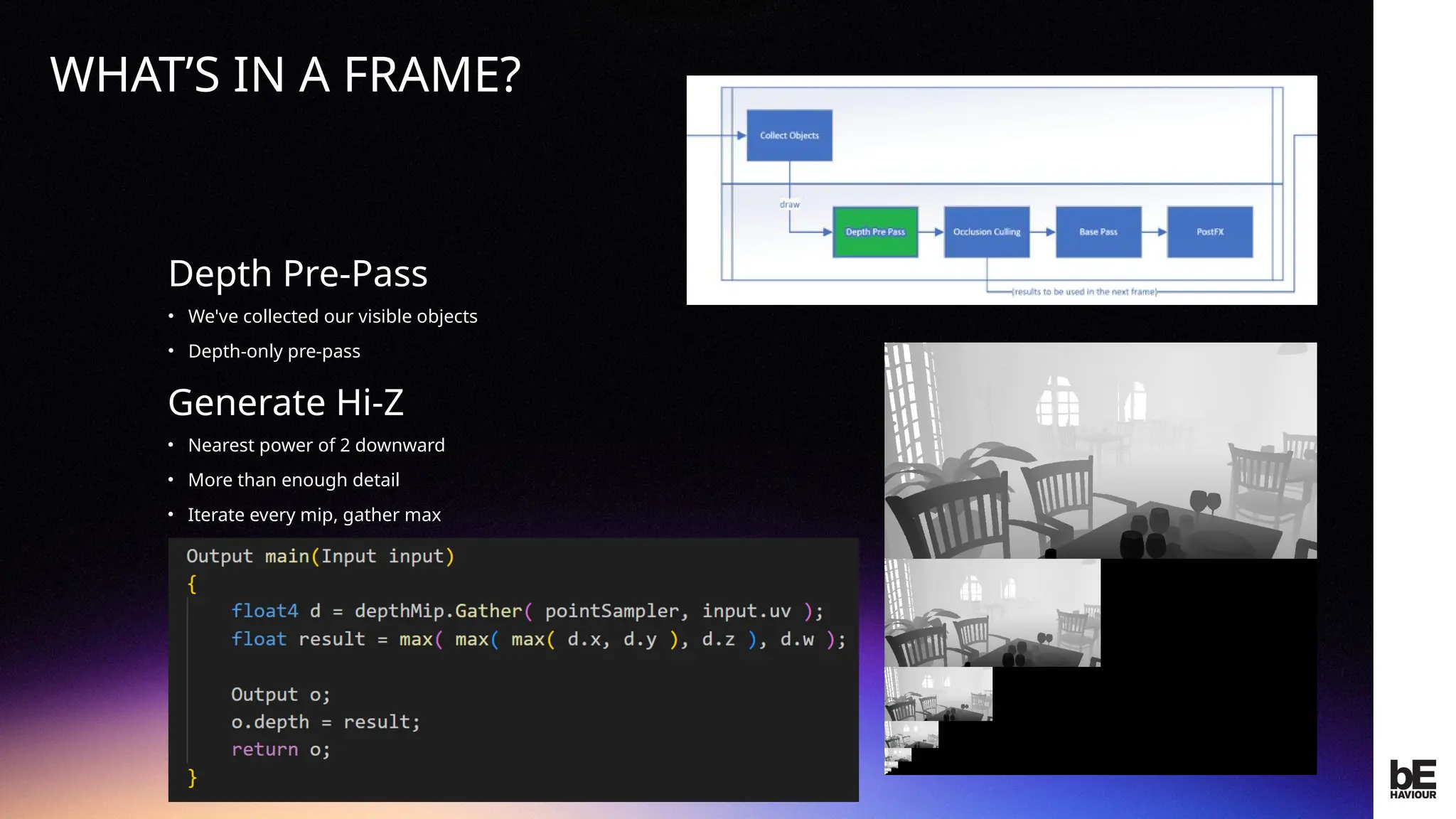
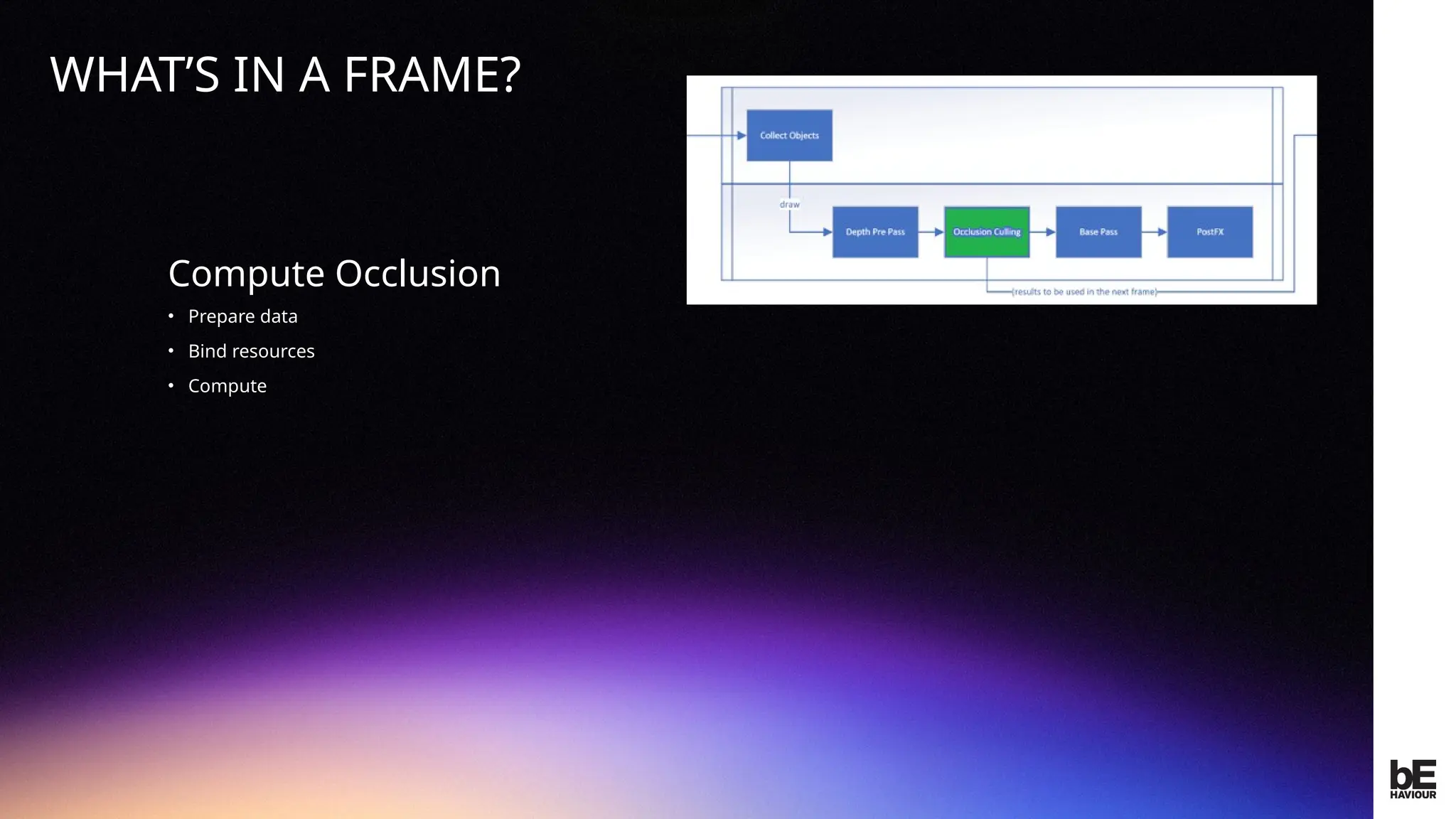
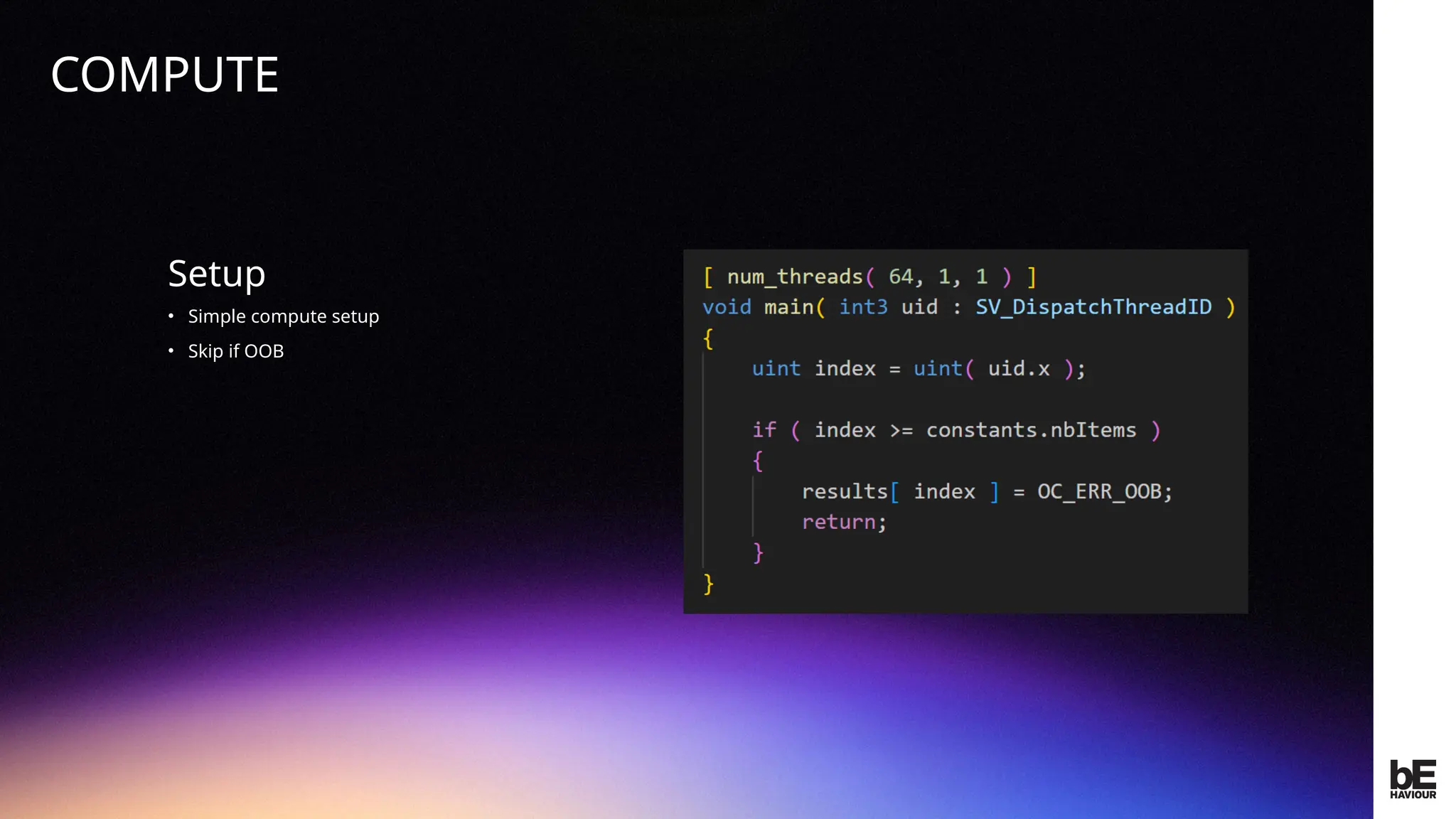
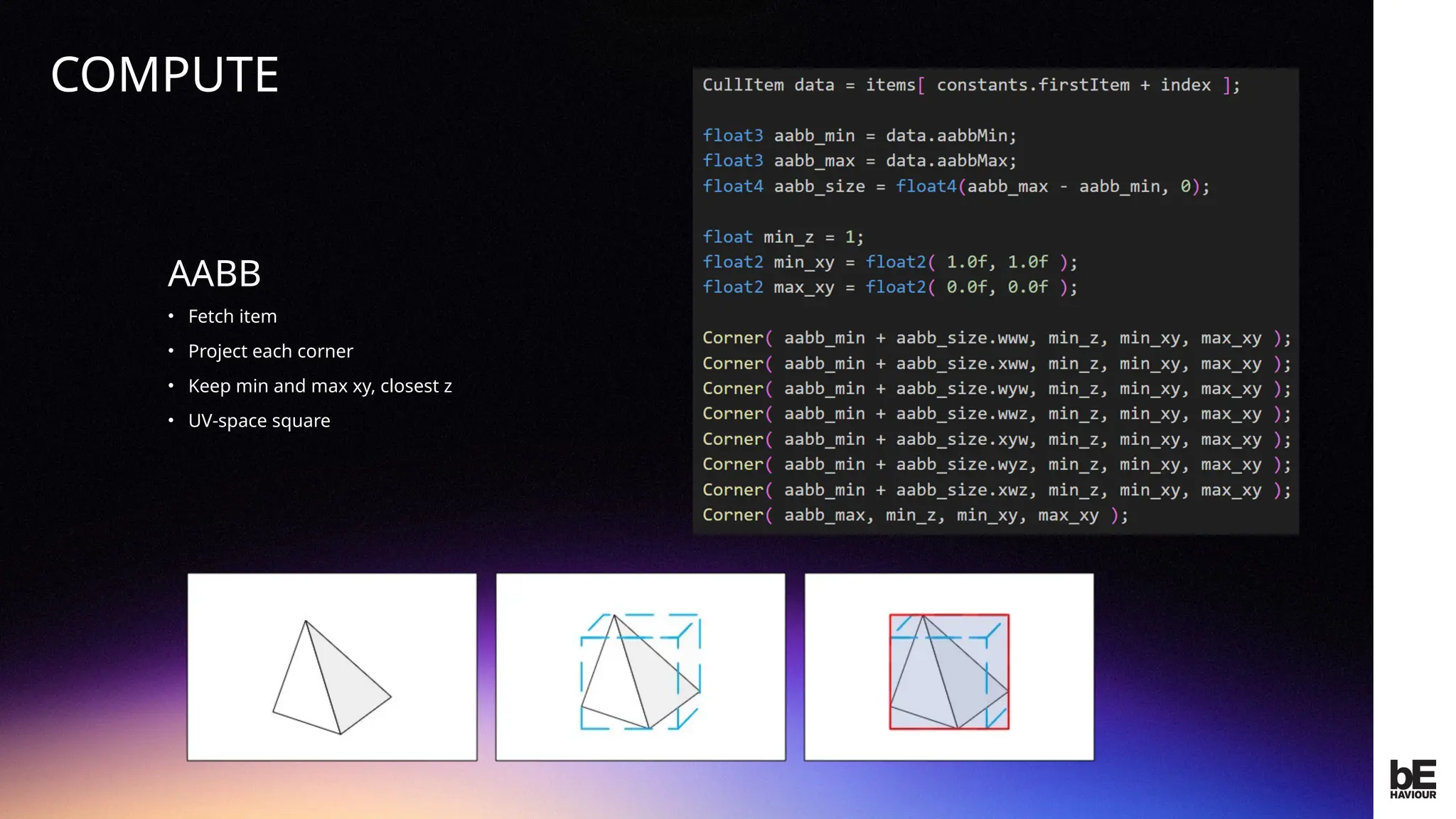
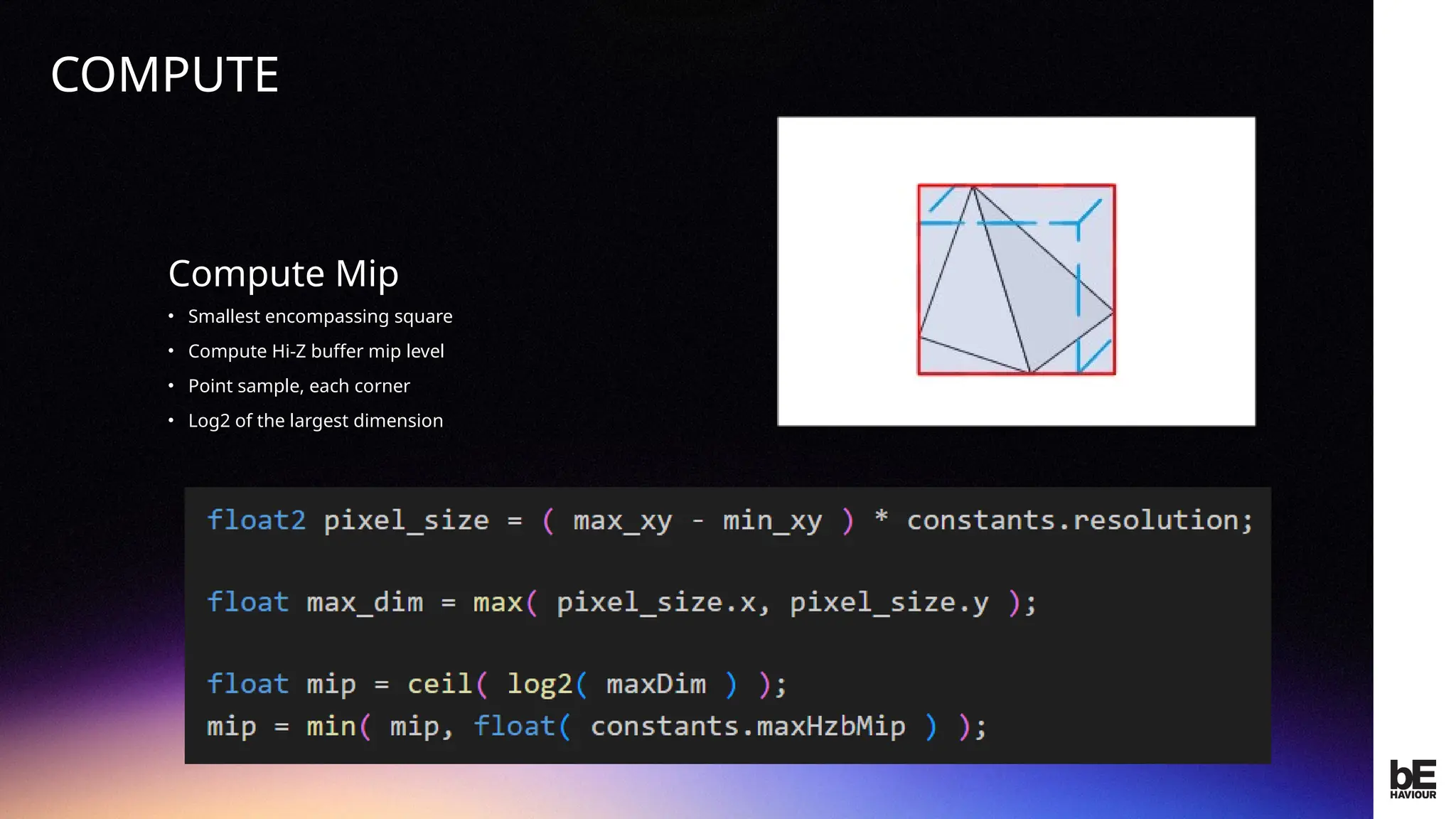
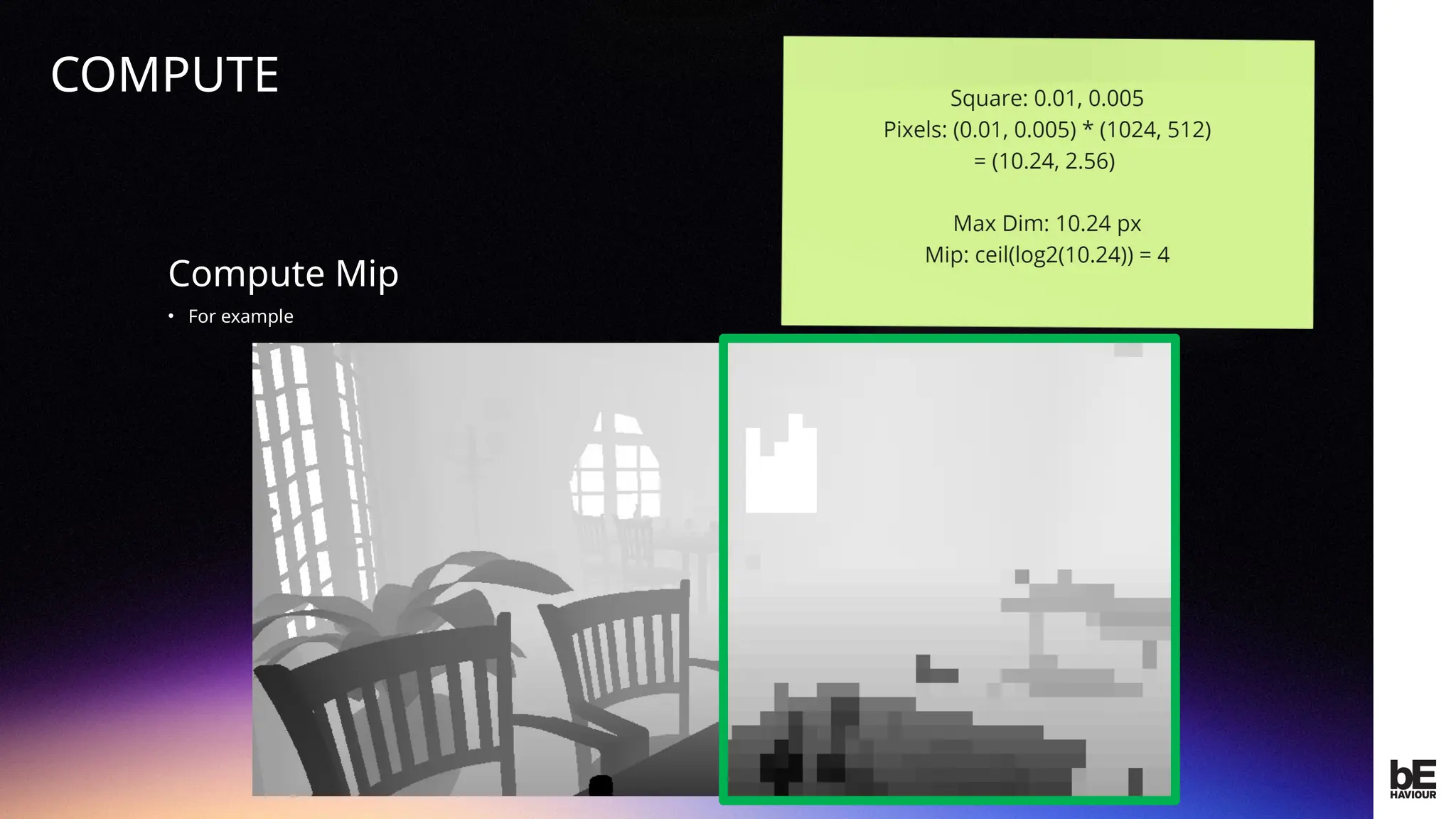
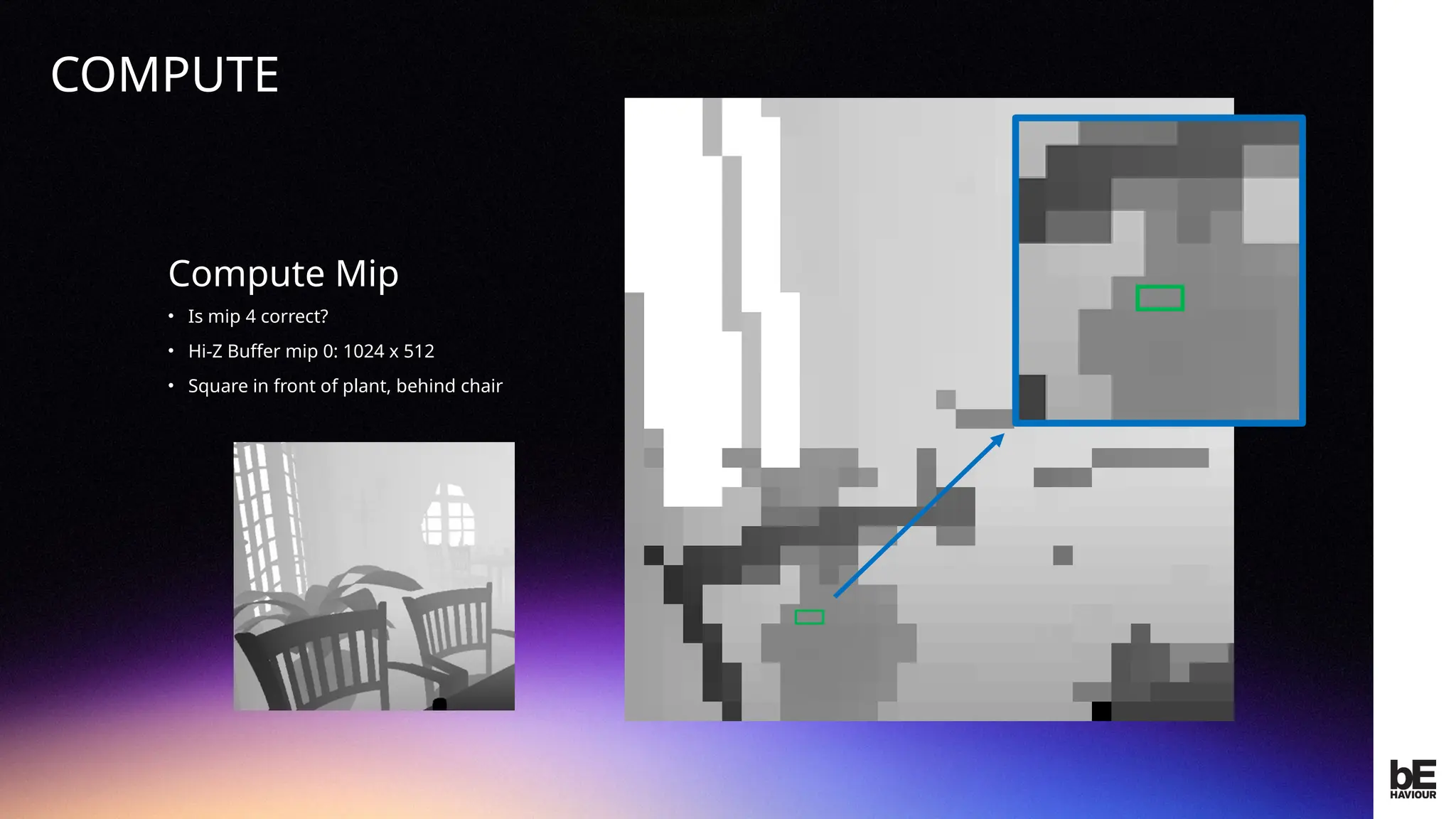
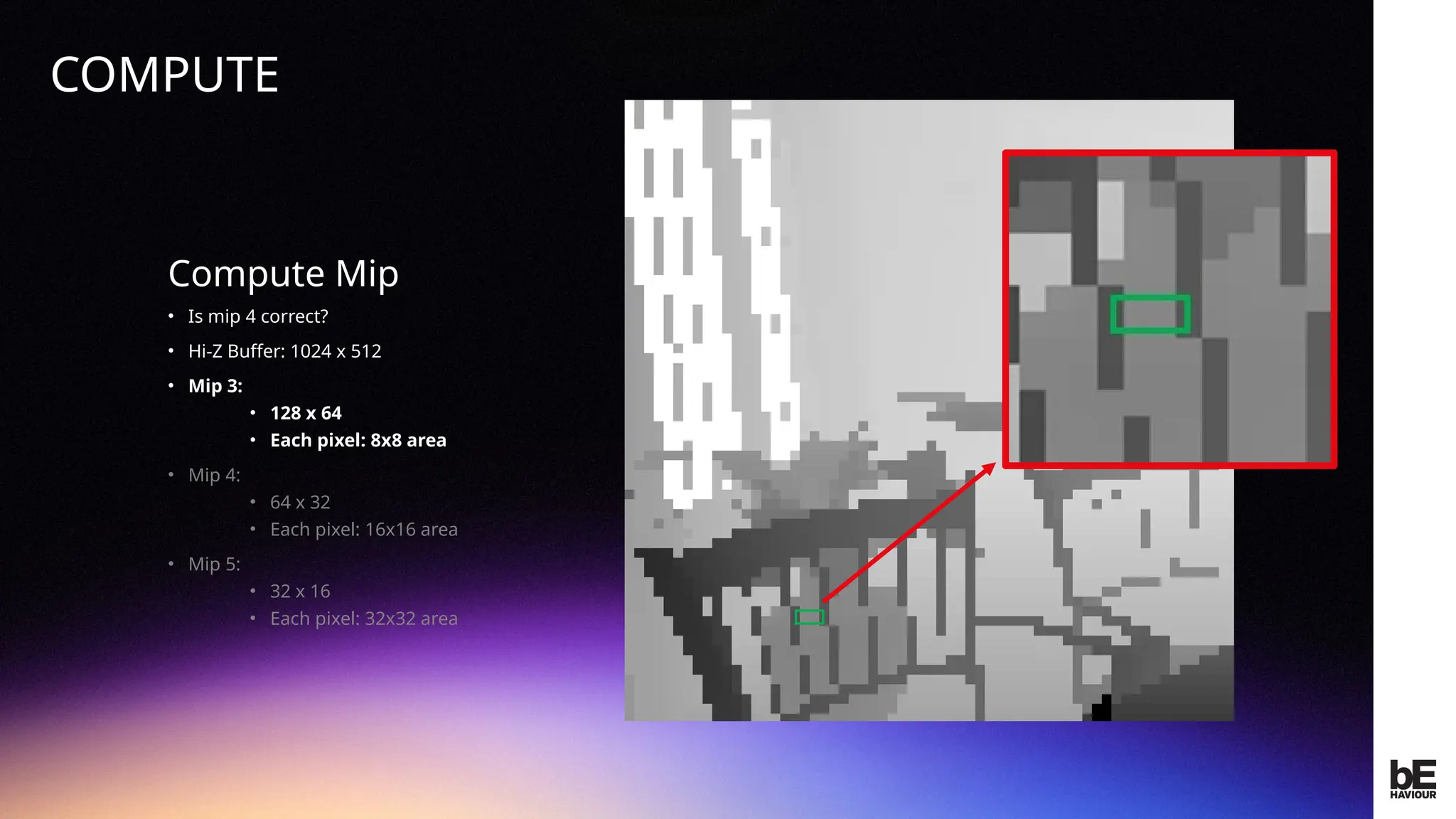
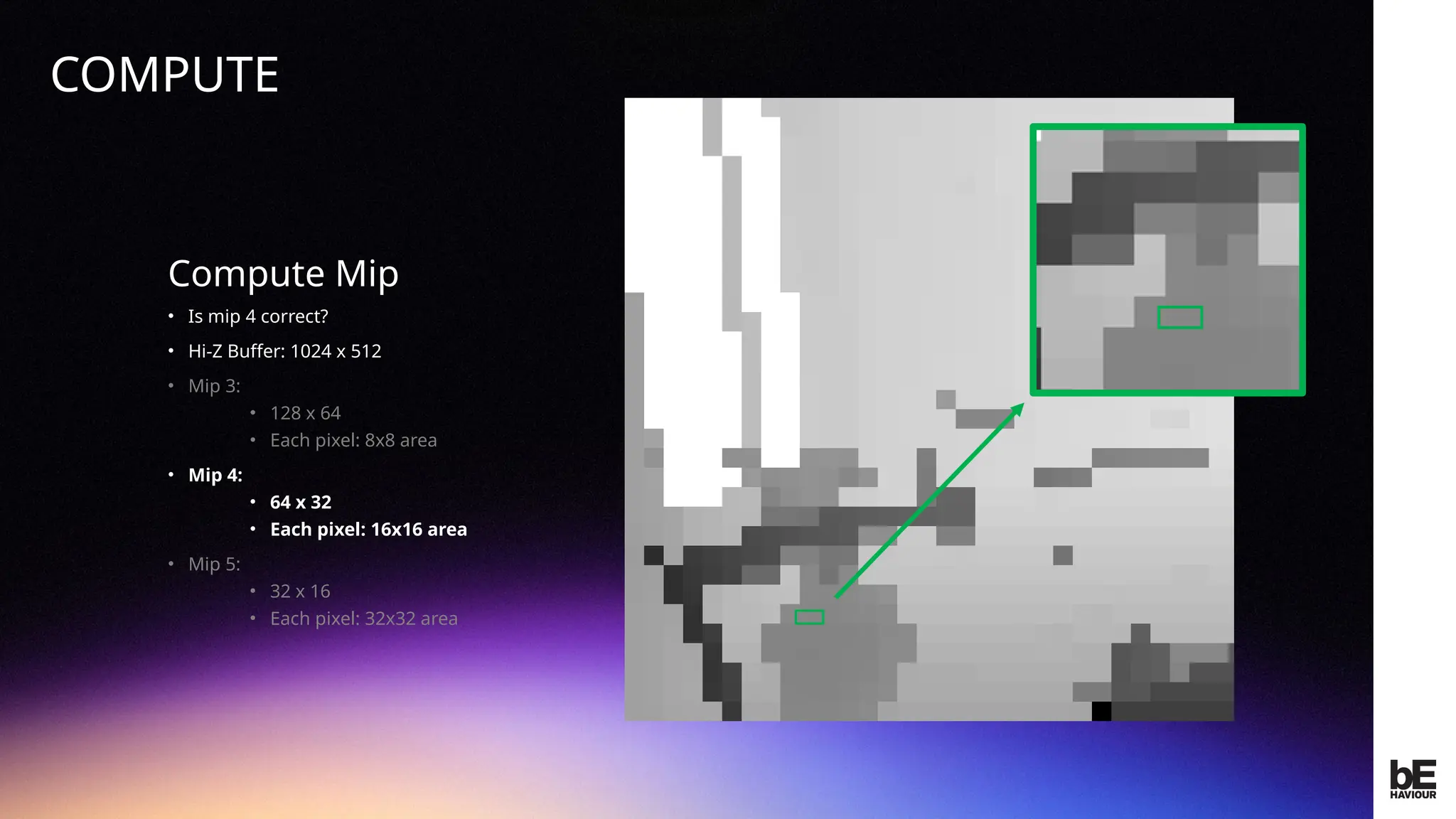
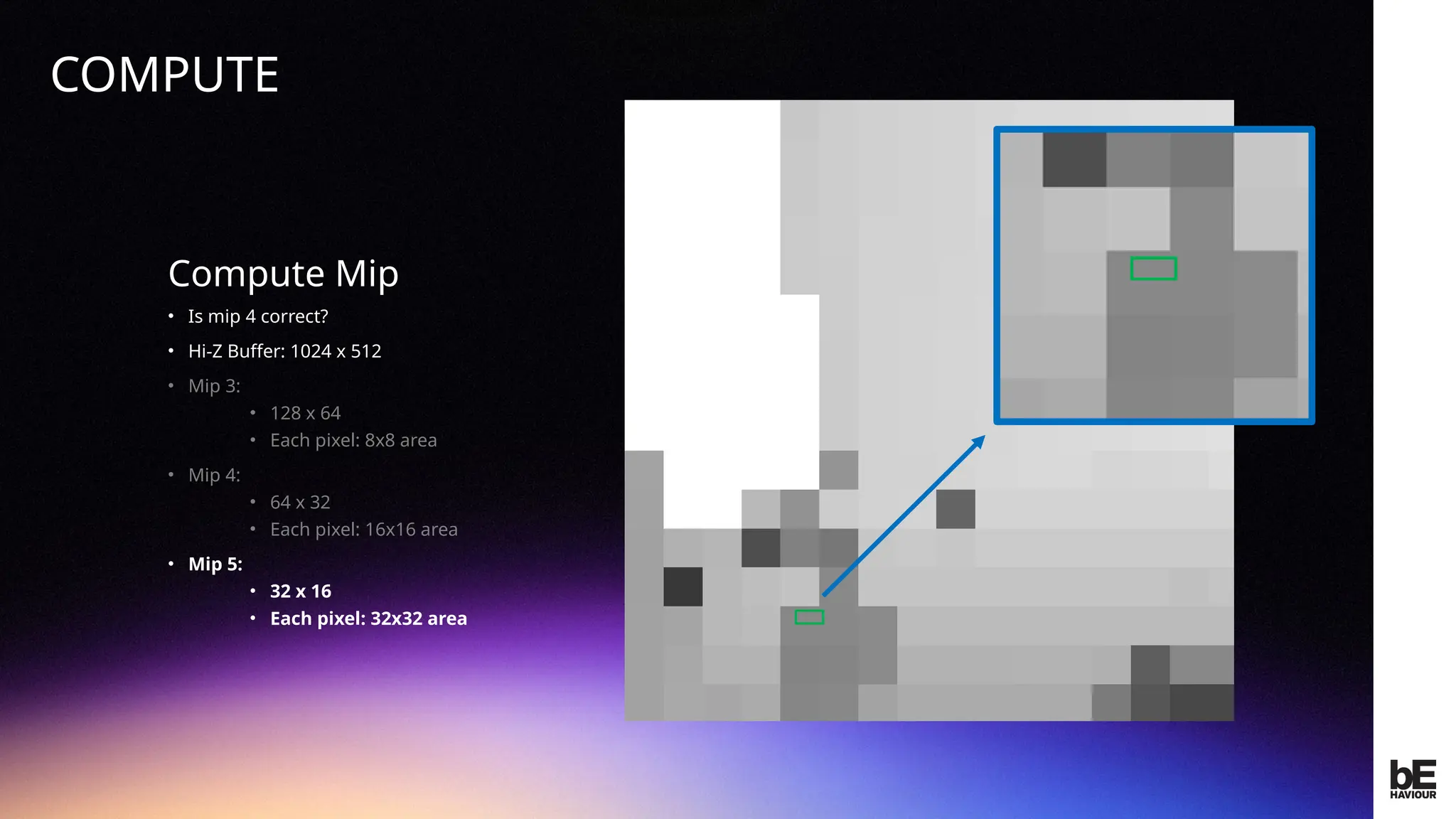
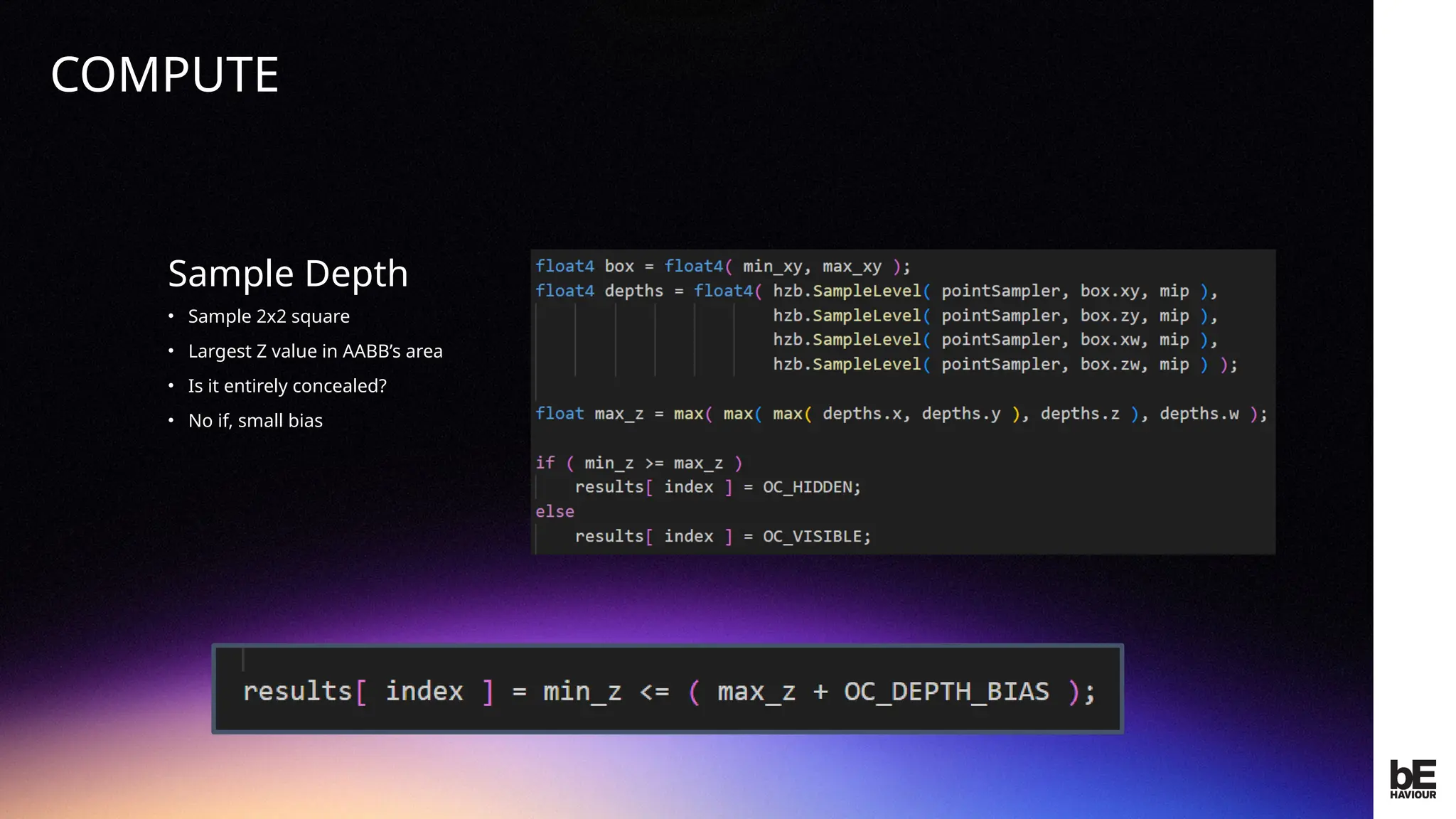
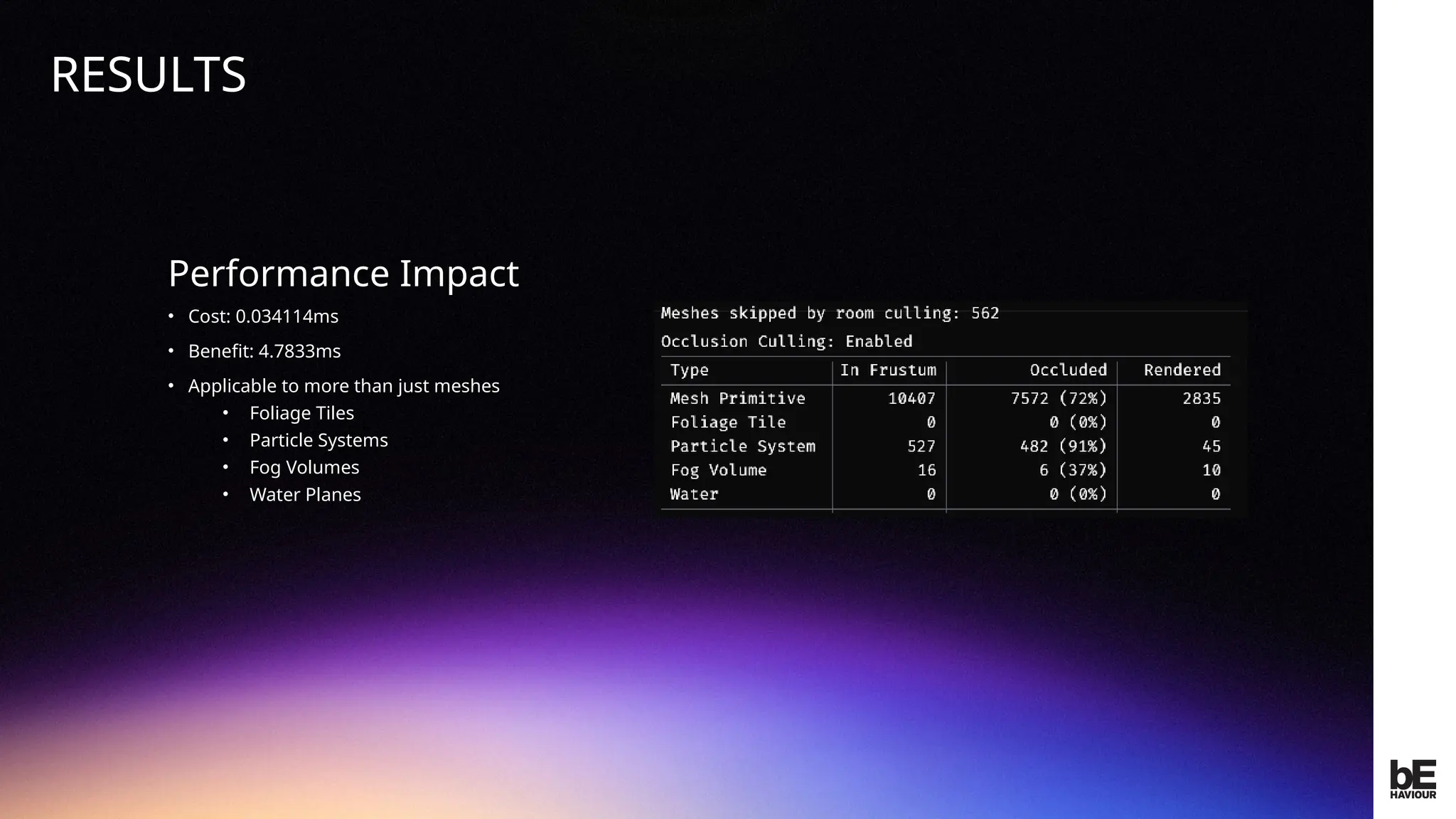
For games that heavily feature dynamic or user-generated levels, classic optimization techniques like static occlusion hierarchies are less viable due to their inflexibility. Runtime-generated acceleration structures introduce their own fair share of CPU and memory overhead. In this talk, Leon will cover an adaptation of GPU-based occlusion culling using a hierarchical z-buffer, which achieved significant performance improvements with minimal computation time.














































![[BDD 2025 - Mobile Development] Exploring Apple’s On-Device FoundationModels](https://cdn.slidesharecdn.com/ss_thumbnails/md-exploringappleson-devicefoundationmodels-251124030840-d690542c-thumbnail.jpg?width=640&height=640&fit=bounds)













![[BDD 2025 - Full-Stack Development] The Modern Stack: Building Web & AI Appli...](https://cdn.slidesharecdn.com/ss_thumbnails/fs-themodernstackbuildingwebaiapplicationswithserverless-251124030844-388cf04f-thumbnail.jpg?width=640&height=640&fit=bounds)

![[BDD 2025 - Full-Stack Development] PHP in AI Age: The Laravel Way. (Rizqy Hi...](https://cdn.slidesharecdn.com/ss_thumbnails/fs-phpinaiagethelaravelway-251125012602-ef9d330e-thumbnail.jpg?width=640&height=640&fit=bounds)






















